Hierarchical Virtual Fixture Design Architecture for Tele-operated Surgical System with Slave Joint Limit Constraints
Abstract
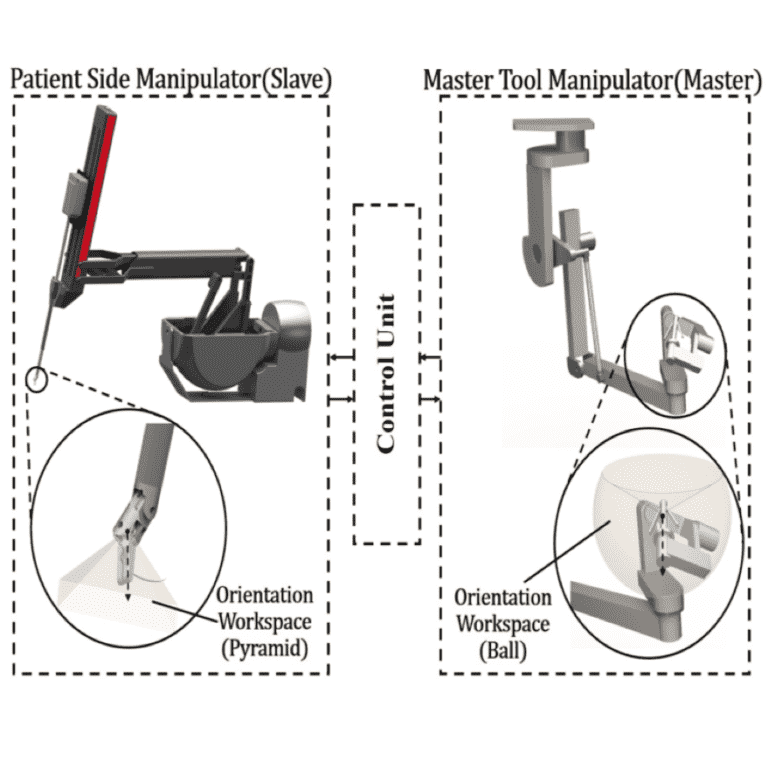
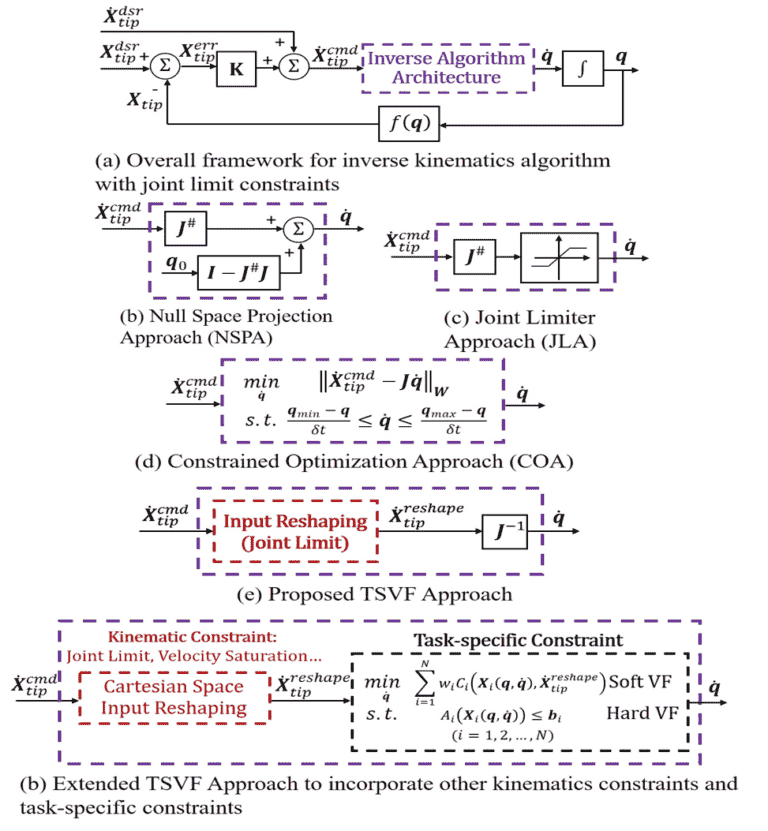
Unintended motion has been one of the major causes of intra-operative injuries in the tele-operated surgery. Due to the huge workspace discrepancy between the master and slave devices, the tip of the slave can deviate from the original master input without prior notice, when it is commanded to move beyond its joint limits. Although conventional solutions like the constrained optimization Virtual Fixture (VF) method could save the slave from mechanical failure, they do not examine the effect of the residual tip error and the resulting obscure VF geometry, which often self-induces user-unexpected tip motions at the constrained boundary regions. To this end, we propose a novel extendable hierarchical VF architecture that decomposes the high-dimensional task space kinematics into several lowdimensional sub-space kinematics. Such decomposition systematically guides us to design VF geometries and efficient VF controllers to manage the residual tip error distribution, build the high-fidelity natural haptic interface, and further minimize self-induced unexpected tip motions. To showcase this idea, we designed and implemented the proposed controller and haptics for the state-of-the-art tele-operated surgical system, da Vinci Research Kit (dVRK). Both simulations and experiments verified the controller’s effectiveness in managing the residual tip error distribution and validated the responsiveness and intuitiveness of the haptics.
Publications
[1] Y. Cai, P. F. Choi, C. W. Vincent Hui, R. H. Taylor, and K. W. Samuel Au, “A Hierarchical Virtual Fixture Architecture for Tele-operated Surgical System with Slave Joint Limit Constraints,” IEEE Transactions on Mechatronics (under review).