Opposite Treatment on Null Space: Avoiding Null Space in Underactuated Systems, and Its Applications
Abstract
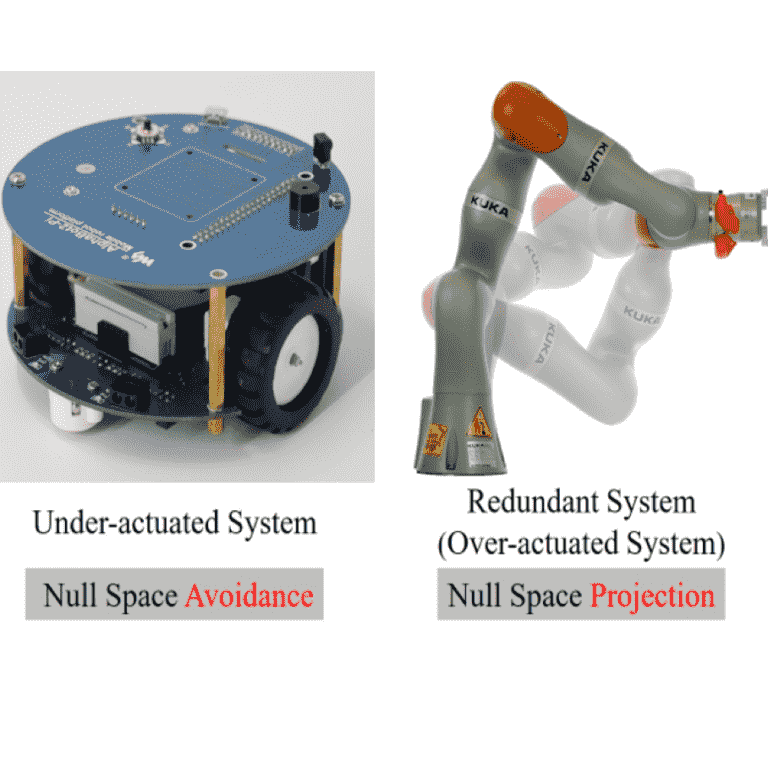
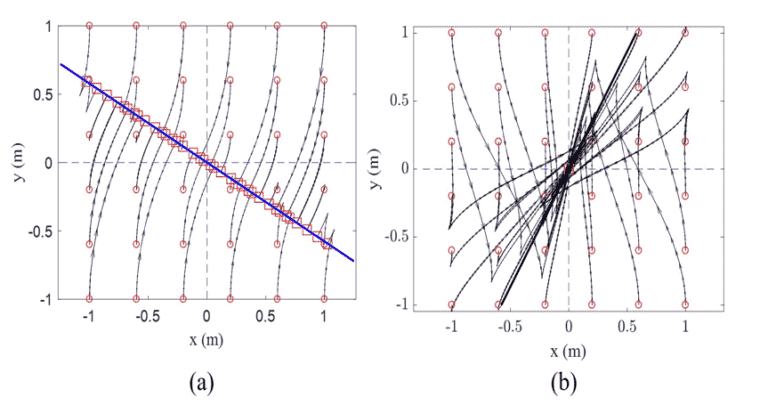
It is known that null space has been widely used in robotics. One normally utilizes it for redundant robots, like KUKA arm (see Fig. 1). The most practical method is null space projection, which is highly relevant with the hierarchical arrangement of multiple tasks, i.e., lower priority tasks would be executed in the null space of their higher priority tasks. However, in underactuated systems, null space becomes a curse, bringing a paradigm shift in controller design. Motivated by this, an opposite treatment in the control of underactuated systems will be proposed, i.e., avoiding null space instead of utilizing null space (see Fig. 1). To illusrate it, we show a visualization of the null space at the steady state when solely applying the standard kinematics controllers to the unicycle (see Fig. 2 (a)). All unicycle trajectories ended at the blue line due to the attraction of null space. With avoiding null space, the unicycle converged to the desired state from a family of initial states (see Fig. 2 (b)). Keeping this in mind, we applied the principle of avoiding null space to the orientation control of an underactuated, tail-inspired robot in flight phase (see the video). In the future, we will extend such a new treatment to more general underactuated systems and attempt to answer the question “what is the closest one can come to a smooth stabilizing feedback when no smooth feedback control exists” raised by Prof. Roger Brockett.
Publications
[1] Xiangyu Chu, C.H. David Lo, Carlos Ma, and K.W. Samuel Au. “Null-Space-Avoidance-Based Orientation Control Framework for Underactuated, Tail-Inspired Robotic Systems in Flight Phase”, IEEE Robotics and Automation Letters (RA-L), Vol. 4, No. 4, pp. 3916-3923, Oct 2019.
[2] Xiangyu Chu, C. H. David Lo, Carlos Ma, Jiajun An, T. Y. Chung, and K. W. Samuel Au. “Towards Agile Maneuver Generation for Terrestrial Robots in Flight Phase”, Workshop on Articulated Actuation Towards Human Capabilities for Robots, 2019 IEEE/RSJ International Conference on Intelligent Robots and System (IROS).
[3] Xiangyu Chu, C.H. David Lo, and K.W. Samuel Au. “Opposite Treatments on Null Space: Null Space Projection vs Null Space Avoidance”, Late Breaking Results Poster, 2019 IEEE/RSJ International Conference on Intelligent Robots and System (IROS).