Design of a Bipedal Hopping Robot With Morphable Inertial Tail for
Agile Locomotion
Abstract
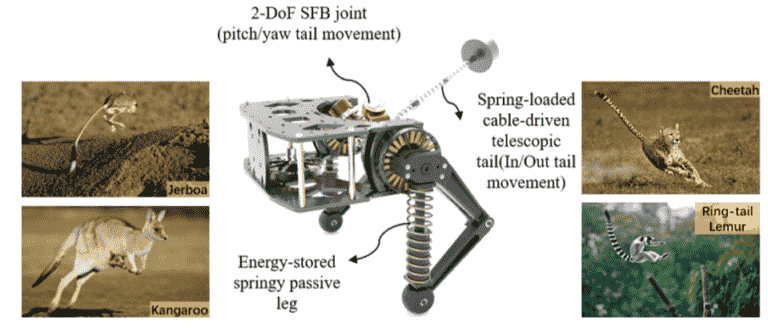
Animals often use their external appendages (such as tails, limbs) to achieve spectacular maneuverability, energy efficient locomotion, and robust stabilization to large perturbations, which may not be easily attained in the existing legged robots. Their appendages, particularly, the tails are very compact, light, highly dexterous with a large range of motion (ROM). Animals can also curl and straighten up their tails in less than one-tenth of a second to facilitate rapid adjustment for the moment of inertia (IoM) and the Center of Mass (CoM). Most of the existing robotic tail designs still lack dexterity, output force, dynamic response. And there is no viable and compact solution to adjust the tail IoM rapidly and effectively. This project aims to address the current limitations in existing tailed robotic systems, in particular, we develop a bipedal tailed hopping robot to investigate how a large ROM morphable inertial tail can enable agile locomotion.
Hopping Behavior
Hopping with Slow-Motion Play
Hopping with Slow-Motion Play
Publications
[1 ] Jiajun An,Tsz Yin Chung,K. W. Samuel Au, “Design of a Bipedal Hopping Robot With Morphable Inertial Tail for Agile Locomotion” , Nov 2019. (Poster presentation was given at the 2019 IROS Late Breaking Results Posters)
[2] Jiajun An, T. Y. Chung, Chun Ho David Lo, Carlos Ma, Xiangyu Chu, and K. W. Samuel Au. “Development of a Bipedal Hopping Robot With Morphable Inertial Tail for Agile Locomotion“. Submitting to International Conference for Biomedical Robotics and Biomechatronics (BioRob) 2020.
[3] Au, K.W.S. et al., “Morphable inertial appendage, systems and associated methods,” US Provisional Patent, US 62/810,258.