Hybrid-Structure Hand-Held Robotic Endoscope for Sinus Surgery with Enhanced Distal Dexterity
Abstract
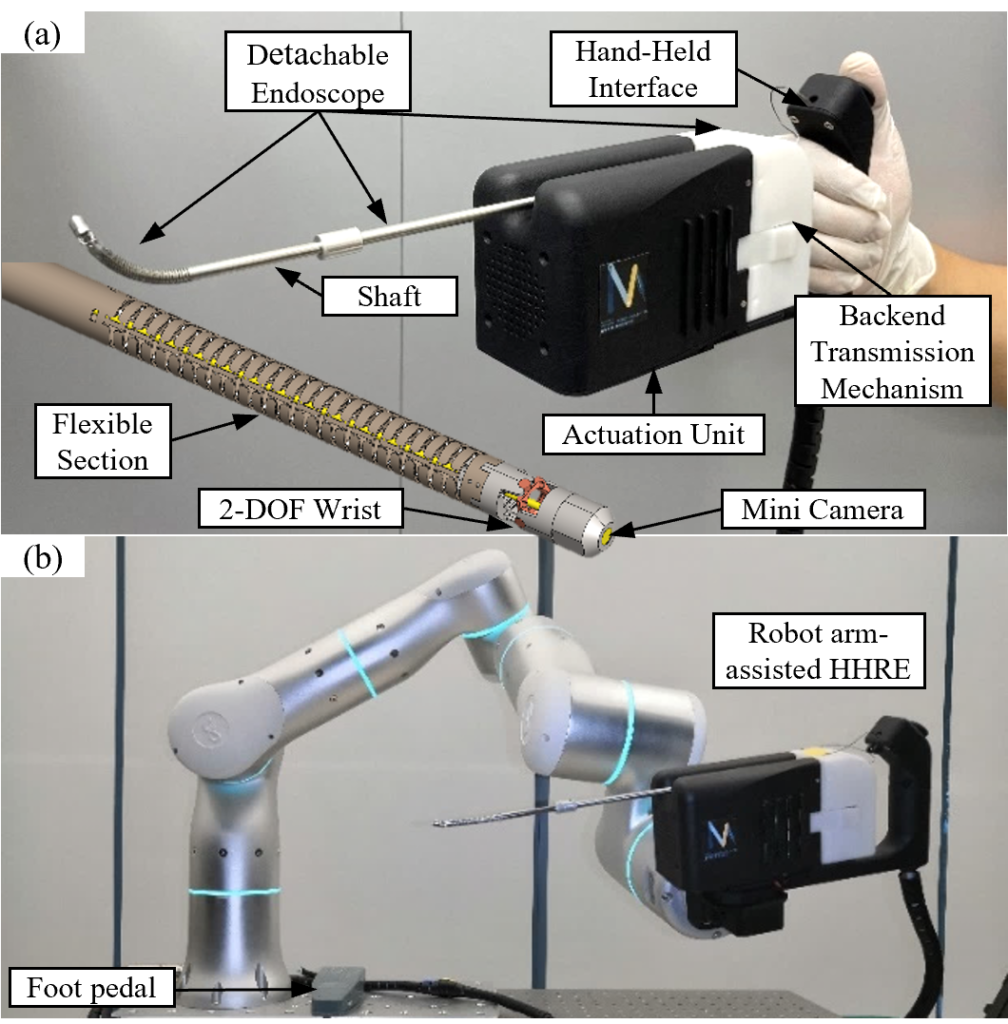
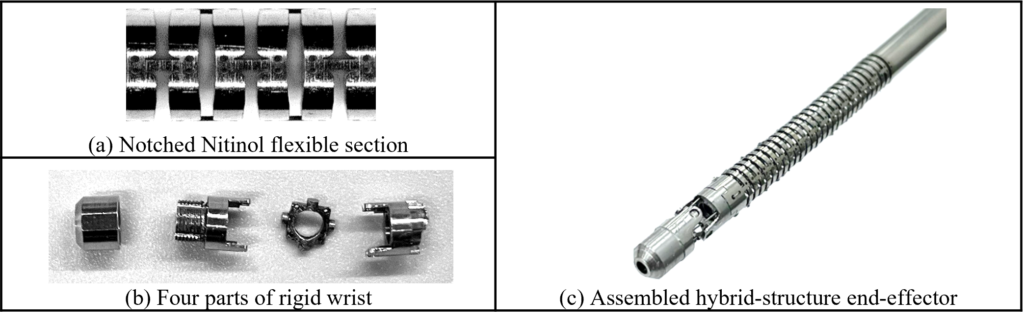
Flexible endoscopes have been widely adopted in clinical practices, which enable surgeons to observe the inside of the body through natural orifices. However, observing lesions inside the narrow space of the human sinus with existing flexible endoscopes is still challenging due to their large occupied motion space and limited dexterity. In this paper, we propose a dexterous hybrid-structure hand-held robotic endoscope (HHRE) for sinus inspection, which composes of a 2 degrees-of-freedom (DOFs) proximal flexible section and a 2-DOF distal articulated wrist structure. Compared with conventional hand-held flexible sinus endoscopes, the proposed HHRE has a larger visual coverage inside the maxillary sinus and smaller occupied motion space due to the 2-DOF wrist structure. Our specially designed flexible section and distal articulated wrist structure offer enhanced torsional stiffness to minimize unpredictable view rotations during the diagnostic inspection. The HHRE can be used as a standalone hand-held device or installed on a robotic platform with gravitational force compensation to minimize surgeon’s fatigue and improve the usability of the endoscope. Various benchtop experiments and a user study have been performed to validate the effectiveness, reachability, and visual coverage of the HHRE in the maxillary sinus. The user study results show that the proposed platform can potentially improve the usability of the endoscope and reduce surgeons’ workload in performing inspections of the maxillary sinus.
Overview of the HHRE
Hybrid-structure manipulator
Publications
[1] X. Wang, J. Yan, X. Ma, Y. K. Chan, R. H. Taylor, S. S. Cheng, and K. W. Samuel. Au, “Hybrid-Structure Hand-Held Robotic Endoscope for Sinus Surgery with Enhanced Distal Dexterity,” IEEE/ASME Transactions on Mechatronics, 2022 (accepted).