A Norm-Regulation-Based Limit Cycle Control of Vertical Hoppers
Abstract
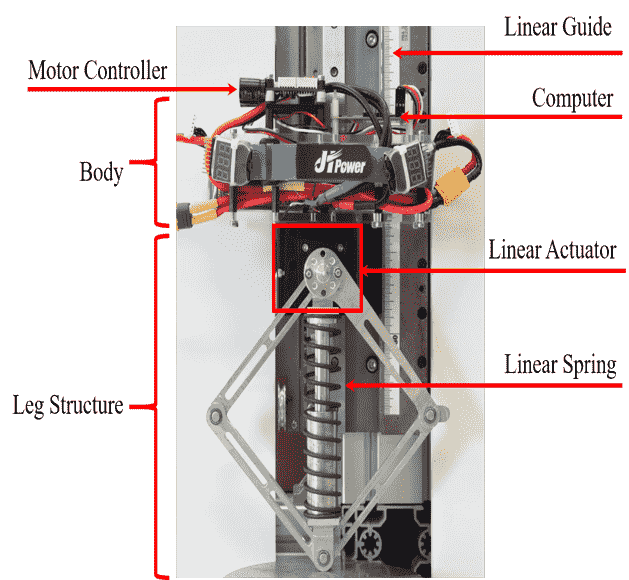
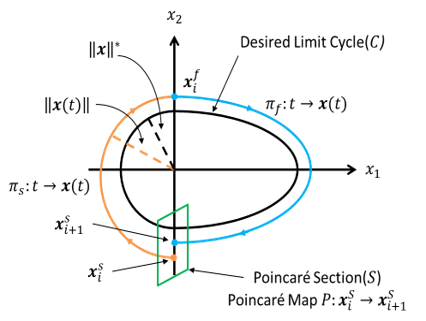
Hopping is considered one of the primitive motion behaviors when studying legged robot. In order to hop, the robot has to know how to pump energy into itself to maintain certain height in a limit cycle manner to prevent it from stumbling. Due to the intermittent between the stance and flight phase dynamics, even though such a simple system like vertical hopping, the analysis of such systems has long been recognized as complex and interesting dynamical control problem. we present an alternative approach to address the hopping height control problem of this discrete dynamic system, called the norm-regulation. Fig. 2 illustrates how the principle of this approach can regulate the state norm, ‖x‖. The idea of norm-regulation is that, to design a controller in stance phase such that it can regulate the magnitude of ‖x‖ to a desired magnitude, ‖x‖^* . In other words, the controller is required to `push’ the state outward and keeps it on the desired limit cycle, C. And the controller is also able to `pull’ the state inward and keeps it on the desired limit cycle, C.
Publications
[1] C. H. David Lo, Xiangyu Chu, and K. W. Samuel Au. “A Norm-Regulation-Based Limit Cycle Control of Vertical Hoppers”, 2020 American Control Conference (ACC)