A Systematic Modelling Approach for Motor-Cable-Joint Kinematics of Coupled Tendon-Driven Surgical Instruments
Abstract
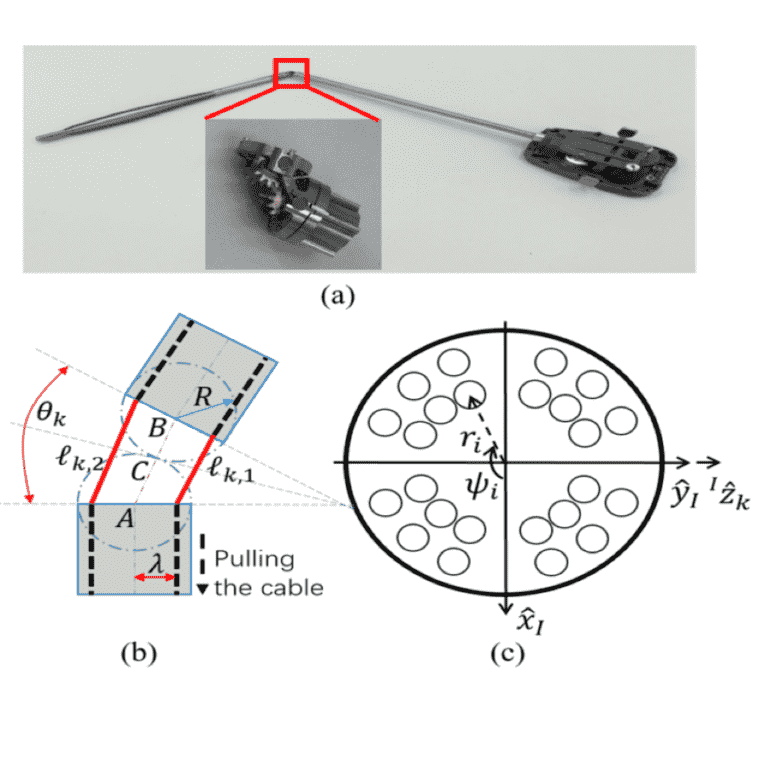
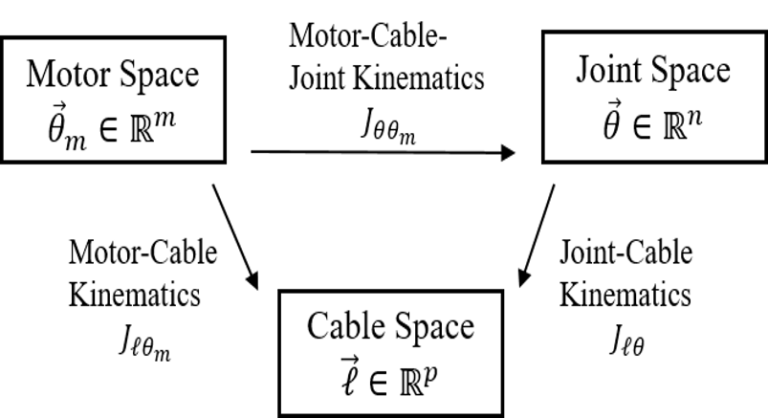
Tendons/cables are able to transmit motor motion into the linear displacement in tendon-driven surgical instruments, which are widely used in the da Vinci Research Kit (dVRK). It is crucial to derive the joint-cable-motor kinematics in such instruments while designing joint controllers for them, since coupling phenomenon between joints due to instrument mechanical design normally exists in the tendon-driven instrument. Previous work built the kinematics for their own designs, however, few efforts have been made to post a systematic and fast modelling method. Here we present a general way to model the joint-cable-motor kinematics for a class of coupled tendon-driven surgical instrument using the rolling joint, based on the representation (Fig. 1) describing the kinematics relationships among three spaces. Moreover, the retractor instrument with coupled wrist joints (Fig. 2) we designed is employed to validate the proposed kinematics modelling approach.
Publications
[1] Xiangyu Chu, Tsz Yin Chung, and K.W. Samuel Au. “A Systematic Modelling Approach for Motor-Cable-Joint Kinematics of Coupled Tendon-Driven Surgical Instrument”, Hamlyn Symposium, pp. 17-18, June 2018. (Poster presentation was given at the 2018 ICRA Workshop on Supervised Autonomy in Surgical Robotics)
[2]Xiangyu Chu, Hoi Wut Yip, Yuanpei Cai, Tsz Yin Chung, Stuart Moran, and K.W. Samuel Au. “A Compliant Robotic Instrument with Coupled Tendon Driven Articulated Wrist Control for Organ Retraction”, IEEE Robotics and Automation Letters (RA-L), Vol. 3, No. 4, pp. 4225-4232, Oct 2018. (This paper is also accepted by 2018 IEEE/RSJ International Conference on Intelligent Robots and System (IROS). A presentation was given.)