Closed-loop Configuration Space Control and Friction Modeling of Tendon Driven Continuum Manipulator for Endoscopic Submucosal Dissection
Abstract
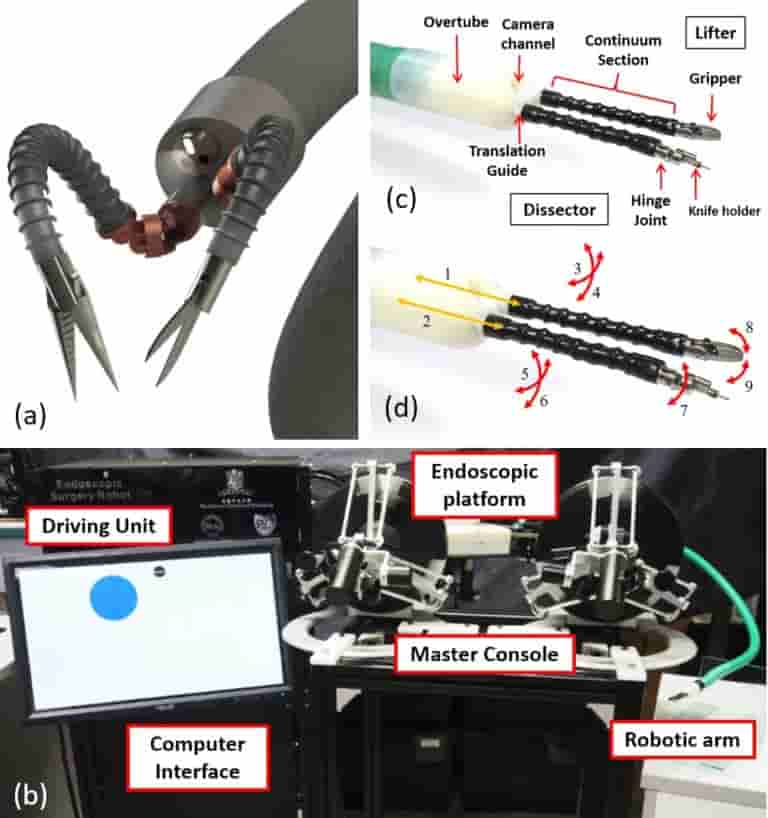
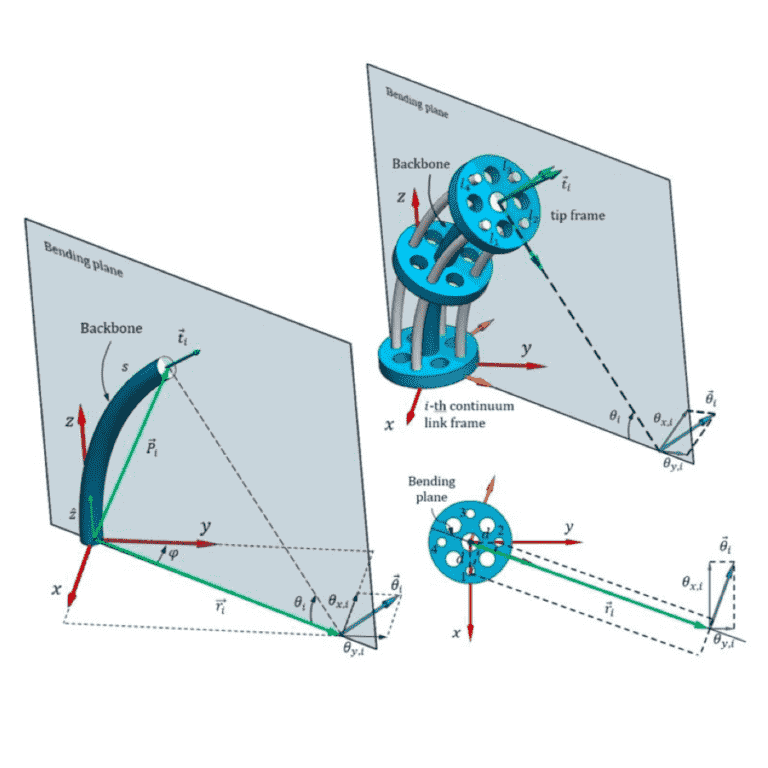
Robotic continuum manipulator has a huge potential in advancing medicines. Our initial studies have shown the robotic continuum manipulator has a great potential to make Endoscopic Submucosal Dissection more accessible and reproducible. However, continuum manipulator often has a poor tracking performance due to model uncertainties, friction in tendons, and lack of distal feedback compensation. In this paper, we will first propose an alternative representation of the continuum manipulator kinematics through Axis-Angle representation. Unlike typical Arc-Geometry representation, the Jacobian mapping of the proposed kinematics model: (1) is well-defined when the manipulator is at zero curvature configuration; (2) provides a simple linear matrix relationship between the configuration space and actuator space. Furthermore, we also propose a new systematic method to model the nonlinear tendon friction which can predict the parabolic curvature behavior of the manipulator. In terms of controller development, we propose a hierarchical controller to improve the pointing direction tracking performance of a continuum manipulator, based on the closed-loop configuration space control and extrinsic Cartesian position measurement of the manipulator tip. We prove the stability of this controller using Lyapunov’s direct method and the experimental results demonstrate the controller can significantly improve the tracking performance.
Publications
[1] K. C. Lau, Y. Cai, Y. Yam, Philip W. Y. Chiu, Z. Sun, H. Wang, and Samuel K. W. Au, “Closed-loop Configuration Space Control and Friction Modeling of Tendon Driven Continuum Manipulator for Endoscopic Submucosal Dissection,” IEEE Transactions on Mechatronics (under review).