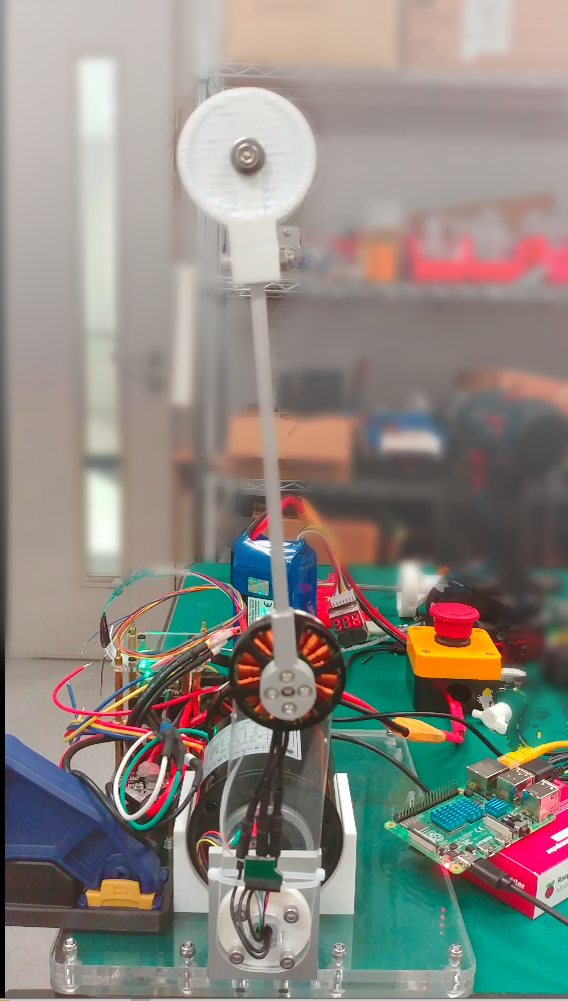
Underactuated Robotic System is a class of robotic system which has a lower number of actuators than degrees of freedom that we want to control. Although the term underactuated may sound unfamiliar to most of us, underactuated system or underactuated phenomena are very common in our physical world. For example, walking, flying, and swimming are all underacted phenomena. People believe that understanding its characteristics as well as developing control principles for underactuated robotic systems can accelerate the development of robotic system with exceptional efficiency, agility, and maneuverability like its biological counterparts such as human, bird, and fish. The Pendubot is an underactuated system which consists of two rigid links interconnected by revolute joints. The first joint is actuated while the second joint is passive. The goal of this project is to balance the unactuated link at the upright configuration by controlling the actuated joint. The existing controllers used in this system is the Linear Quadratic Regulator (LQR) controller for the balancing phase and the energy shaping controller for the swing up phase
Prototype 1
Prototype 2
Prototype 3
Prototype 4
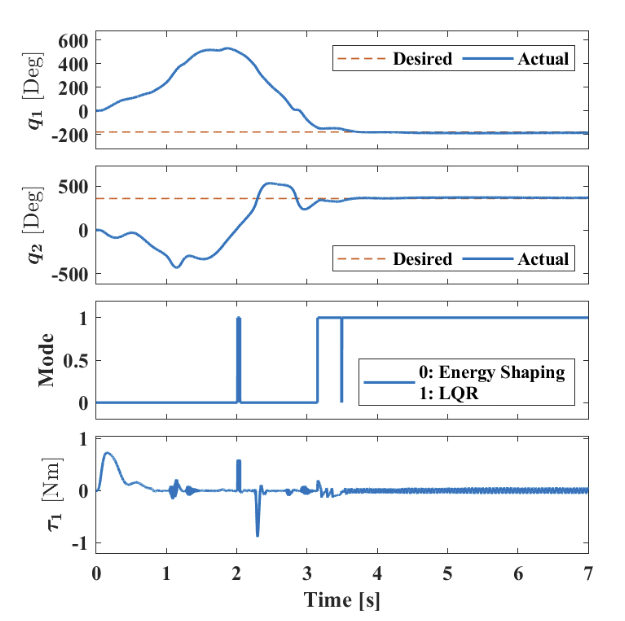
Swing-up Experiment for Acrobot
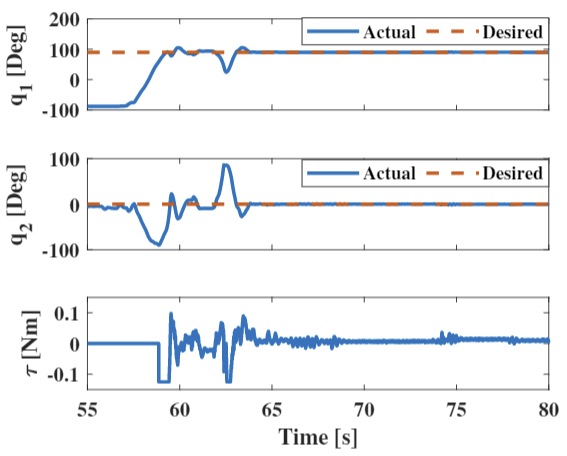
Swing-up Experiment for Pendubot
Publication
[1] R. Ng, Y. Tang, H. Lin, X. Chu and K. W. Samuel Au, “Development of a Portable Hybrid Pendubot-Acrobot Robotic Platform for On and Off Campus Teaching and Learning,” American Control Conference (ACC), 2021.