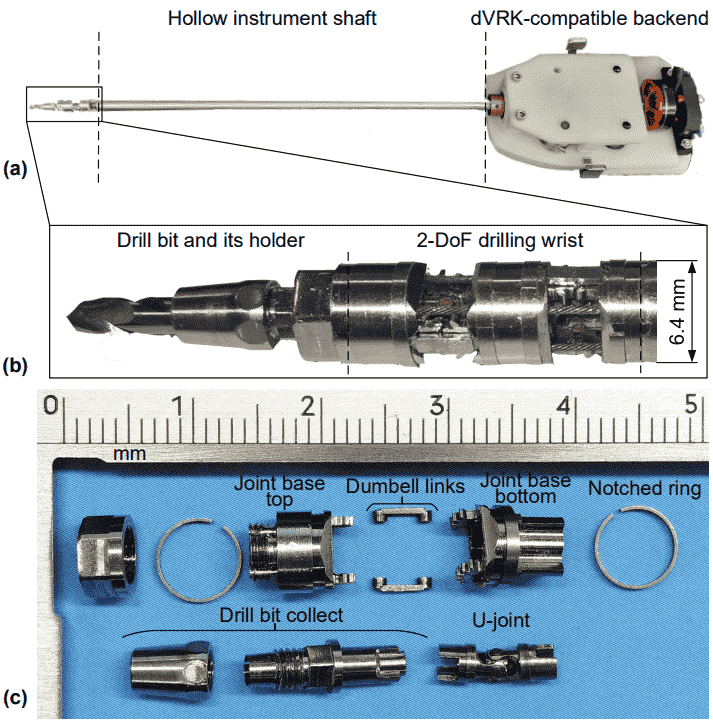
Steerable drills have the potential to minimize the required dimensions of incisions in minimally invasive spine fusion (MISF). Existing steerable drills mostly rely on flexible continuum mechanisms to create distal tip steerability. However, due to their inherent compliance and underactuation, high stiffness and dexterity cannot be achieved at the same time, which limits their application. In this paper, we present a 6.4-mm robotic steerable surgical drill offering high stiffness, strength, and dexterity, Simultaneously. Contrary to existing flexible-transmission-based approaches, we use non-flexible transmissions (tendon-driven articulated joints and universal joints) to provide two distal degrees of freedom. To evaluate its performance, we integrated it with a customized tendon actuation platform for mechanical performance tests and the da Vinci Research Kit (dVRK), as an exchangeable instrument, for robotic steerable drilling tests. The results of these tests showed that our drill had high strength, stiffness, accuracy, and drilling stability while preserving high steerability and was sufficient to complete hole drilling in confined space in MISF.