End-to-End Learning of Deep Visuomotor Policy for Needle Picking
Abstract
Needle picking is a challenging manipulation task in robot-assisted surgery due to the characteristics of small slender shapes of needles, needles’ variations in shapes and sizes, and demands for millimeter-level control. Prior works, heavily relying on the prior of needles (e.g., geometric models), are hard to scale to unseen needles’ variations. In this paper, we present the first end-to-end learning method to train deep visuomotor policy for needle picking. Concretely, we propose DreamerfD to maximally leverage demonstrations to improve the learning efficiency of a state-of-the-art model-based reinforcement learning method, DreamerV2; Since Variational Auto-Encoder (VAE) in DreamerV2 is difficult to scale to high-resolution images, we propose Dynamic Spotlight Adaptation to represent control-related visual signals in a low-resolution image space; Virtual Clutch is also proposed to reduce performance degradation due to significant error between prior and posterior encoded states at the beginning of a rollout. We conducted extensive experiments in simulation to evaluate the performance, robustness, in-domain variation adaptation, and effectiveness of individual components of our method. Our method, trained by 8k demonstration timesteps and 140k online policy timesteps, can achieve a remarkable success rate of 80%. Furthermore, our method effectively demonstrated its superiority in generalization to unseen in-domain variations including needle variations and image disturbance, highlighting its robustness and versatility.
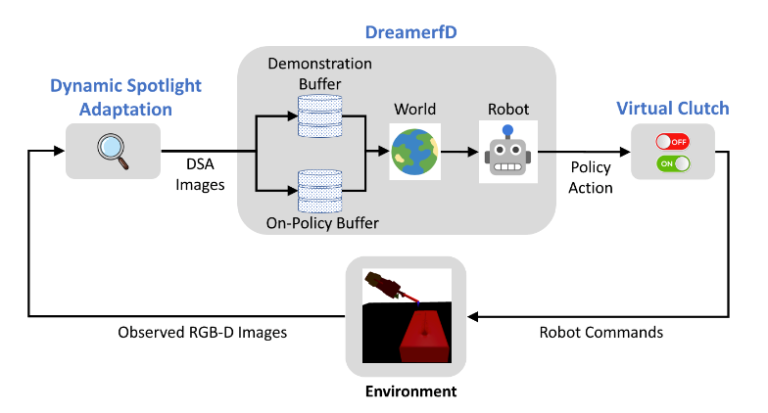
Fig. 1. An overview of our method for end-to-end learning of deep visuomotor policy for needle picking

Fig. 2. Canonical stages of needle picking (left) in RAS, including initial state, approaching, grasping, and lifting. In-domain variations in needle picking (right).
We consider two instances for size variations and another two instances for shape variations.
Publications
[1 ] H. Lin, B. Li, X. Chu, Q. Dou, Y. Liu, and K. W. S. Au, “End-to-End Learning of Deep Visuomotor Policy for Needle Picking,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023.