A Kung Fu Robot: Bruce that Can Flip, Kick, Land, and Hop for Survival as in Predator-Prey Interaction
Abstract
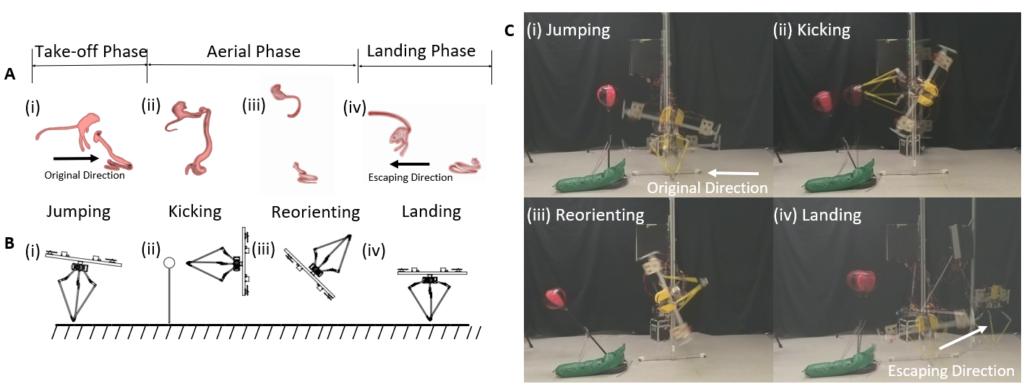
This project aims to investigate an evasive survival capability that is common in predator-prey interaction. Our lab has a close collaboration with a group of biologists who provide extensive insights on animals’ predator-prey interaction, especially the interaction between kangaroo rats (k-rats) and rattlesnakes (Fig. 1A). Inspired by those (Fig. 1B), we, including roboticists and engineers, propose and design a novel robot, called Bruce for respecting Kung Fu star Bruce Lee and his famous Bruce Lee flying kick. Combing bio-inspiration and engineering solutions, Bruce, as the world’s first Kung Fu robot, can kick an “enemy” in the air, which greatly mimics the escaping behavior of k-rats once attacked by a snake, with other indispensable capabilities such as jumping from the ground, reorientating for their changing heading angle, and landing stably for subsequent bounding away (Fig. 1C).
Fig. 1. Bruce is a monopod with a novel appendage that can flip, kick, land, and hop. (A) K-rats use a series of dynamic motions while escaping. (B) Four motions which are crucial for escape and extracted for robot development [Sketches have been flipped for matching robot performance]. (C) To demonstrate the evasive survival capability in robots, we conducted a Bruce Lee flying kick with Bruce experimentally. The ball was used to mimic the rattlesnake’s head. A frame is used, allowing Bruce to move freely in sagittal plane.
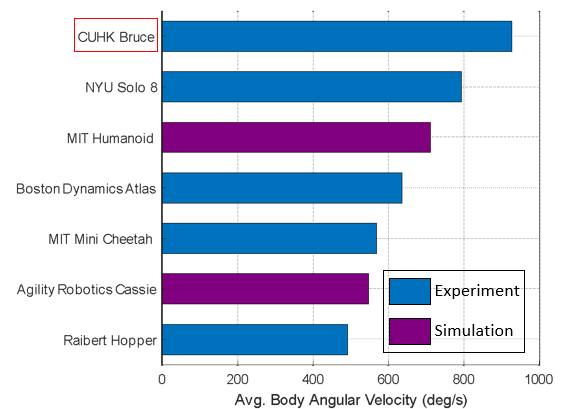
Besides, Bruce is an incredible platform for exploring extremely dynamic robot motion. People normally use flipping to demonstrate their robots’ agility, however, almost all of them only achieved a single flip due to insufficient average body angular velocity (Fig. 2). Bruce can easily do a single flip; more importantly, it can do a double flip (Fig. 3). To our best knowledge, this is the first time to achieve double flips with safe landing in a legged robot.
Fig. 2. Bruce can achieve the largest average body angular velocity among existing legged robots.
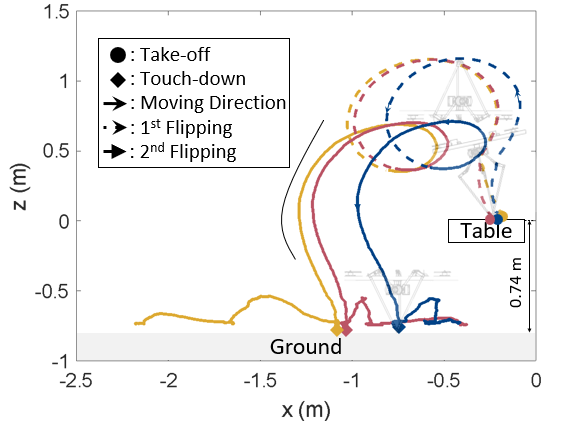
Fig. 3. Bruce can achieve the world’s first double flips. The plots denote the foot trajectories.