Legged Robot Running on Rough Terrains Based on Norm Regulation of Spring-Loaded Inverted Pendulum Model
Abstract
Legged locomotion is a complex control problem involving multi-linkage, underactuation, and hybrid dynamics. To traverse through a compliant surface, the inclusion of uncertainties and unstructured disturbances aggravates the problem and makes it intractable, despite the existence of powerful trajectory planning algorithms. In this paper, we investigate the running behaviour of a legged robot with the consideration of a compliant surface by proposing a control framework which comprises i) a limit-cycle-based state feedback controller to regulate the norm of the leg length, ii) a hip velocity controller, and a landing angle controller so that the robot can continuously control the energy and state to achieve the desired running height and speed even on a compliant surface. We demonstrate the effectiveness and robustness of the proposed method on a monoped and a biped in simulation and hardware, respectively.
Test on planar running on rough terrains:
Test on bipedal running
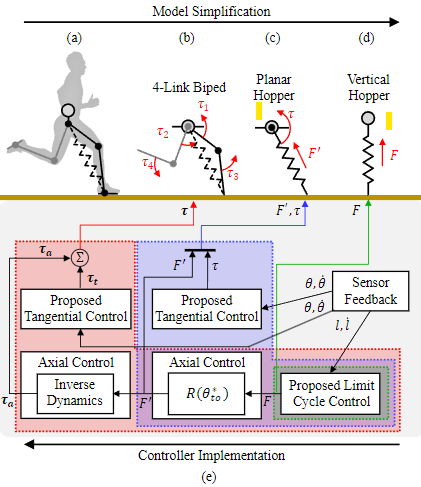
Figure Describing the Control Framework:
Fig. 1. Methodology of model simplification and (stance phase) controller synthesis in a scalable framework.