Model-Free Large-Scale Cloth Spreading With Mobile Manipulation:
Initial Feasibility Study
Abstract
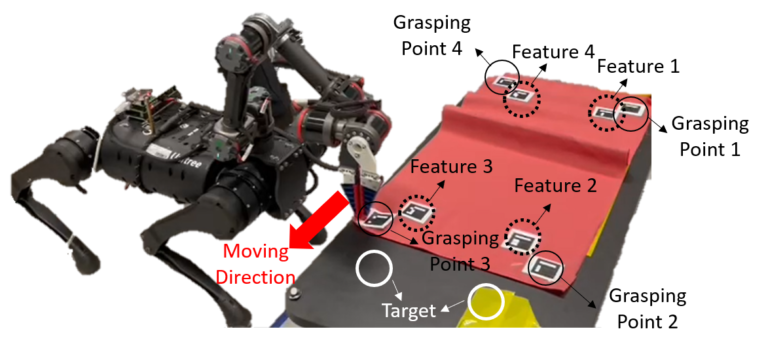
Cloth manipulation is common in domestic and service tasks, and most studies use fixed-base manipulators to manipulate objects whose sizes are relatively small with respect to the manipulators’ workspace, such as towels, shirts, and rags. In contrast, manipulation of large-scale cloth, such as bed making and tablecloth spreading, poses additional challenges of reachability and manipulation control. To address them, this paper presents a novel framework to spread large-scale cloth, with a single-arm mobile manipulator that can solve the reachability issue, for an initial feasibility study. On the manipulation control side, without modeling highly deformable cloth, a vision-based manipulation control scheme is applied and based on an online-update Jacobian matrix mapping from selected feature points to the end-effector motion. To coordinate the control of the manipulator and mobile platform, Behavior Trees (BTs) are used because of their modularity. Finally, experiments are conducted, including validation of the model-free manipulation control for cloth spreading in different conditions and the large-scale cloth spreading framework. The experimental results demonstrate the large-scale cloth spreading task feasibility with a single-arm mobile manipulator and the model-free deformation controller.
Publications
[1 ] Xiangyu Chu, Shengzhi Wang, Minjian Feng, Jiaxi Zheng, Yuxuan Zhao, Jing Huang and Kwok Wai Samuel Au “Model-Free Large-Scale Cloth Spreading With Mobile Manipulation: Initial Feasibility Study”, 2023 IEEE 19th International Conference on Automation Science and Engineering (CASE) , 2023.