Design and Experimental Validation of a Monopod Robot with 3-DoF Morphable Inertial Tail for Somersault
Abstract
Animals and human often use their external appendages (such as tails or arms) to achieve spectacular maneuverability and various agile motions, which cannot be easily realized in the existing legged robots. Many animals can bend or straighten up their tails in about a tenth of a second to facilitate rapid adjustment in the moment of inertia (MoI) and the center of mass (CoM). However, existing robotic tails have a fixed length, limiting their inertial adjustment capability for agile locomotion. Therefore, in this paper, a monopod robot with a compact, 3-DoF morphable inertial tail, is proposed to explore the effect of tail’s inertial adjustment capability on robot agility, particularly on somersault motion. The proposed 3-DoF tail composes of tail orientation structure and scissor-lift parallel mechanism based morphable inertial structure, enabling effective inertial adjustment within 0.15 s. A novel springy underactuated leg with a large stroke is also proposed to facilitate the robot’s jumping capability, necessary for somersault. We also develop a dynamic model and propose motion controllers to study the tail-assisted somersault. Simulation and experimental results demonstrate the effectiveness of the proposed mechanical design and controllers in doing tail-assisted somersault. Using our proposed adjustable-length tail, the stabilized body rotation speed during flight phase can become twice of that with a fixed-length tail. Lastly, for the first time, our robot successfully completed an advanced somersault (somersault with a twist) by utilizing the tail’s 3D inertial adjustment capability.
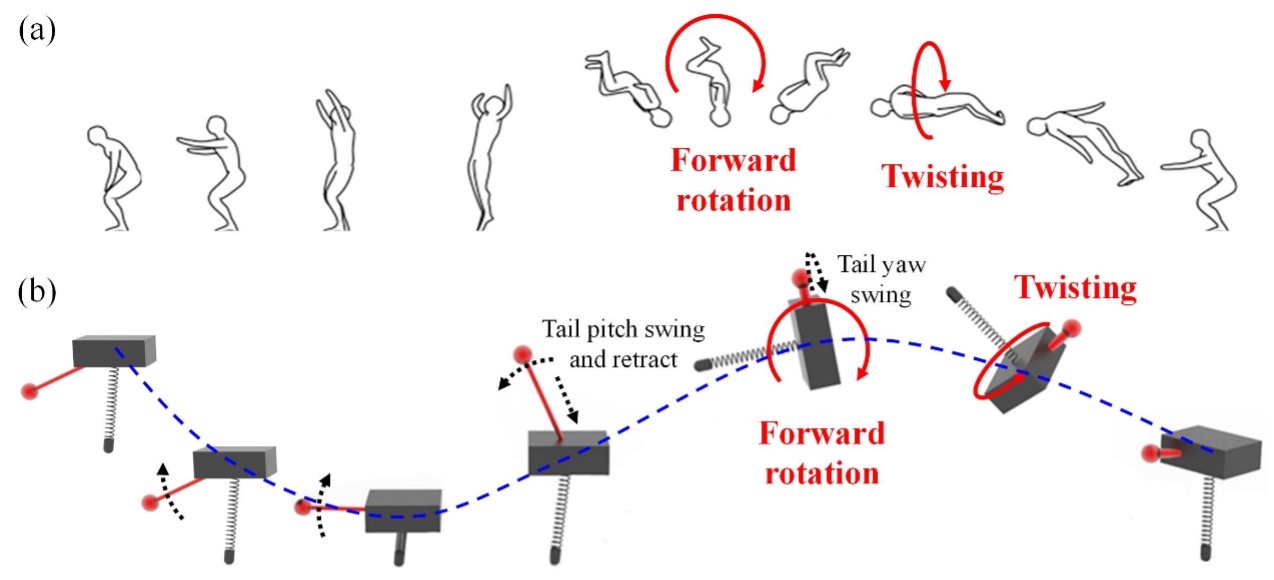
Illustration of a tail-assisted somersault with a twist (an advanced somersault) inspired by human gymnasts [2]. (a) A gymnast performing a somersault with a twist. (b) Our robot performing a somersault with a twist by using the proposed tail's 3D inertial adjustment capability.
Publications
[1] J. An, X. Ma, C. H. David Lo, W. S. Ng, X. Chu, K. W. Samuel Au, “Design and Experimental Validation of a Monopod Robot with 3-DoF Morphable Inertial Tail for Somersault,” IEEE Transaction of Mechatronics, 2021
[2] Back Flip Lab, “Standing back full twist,” in https://backfliplab.com/backflip/standing\_back\_full\_twist