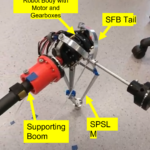
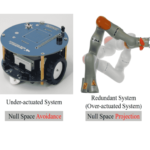
Biorobotics Research Robot Control Legged Robot Running on Rough Terrains Based on Norm Regulation of Spring-Loaded Inverted Pendulum Model Combining Tail and Reaction Wheel for Underactuated Spatial Reorientation in Robot Falling With Quadratic Programming Tailed Hopping Robot: Tail Energized Hopping and Hopping Orientation Control Design and Control of Educational Underactuated Platforms A Norm-Regulation-Based Limit Cycle Control of Vertical Hoppers Opposite Treatment on Null Space: Avoiding Null Space in Underactuated Systems, and Its Applications